赛场上
它们是力压群雄的冠军选手
以智能算法突破竞技极限
手术台前
它们是无影灯下的 “数字医师”
以微米级精度完成复杂手术
舞台上
它们是传承古韵的国风乐手
指尖轻触便奏响千年雅韵
生产车间里
它们还是打造大国重器的 “幕后工匠”
助力北斗导航、载人航天
探月等重大工程
它们就是清华师生打造的
灵活多变的各类机器人
现在就让我们一起走进清华园
揭开这些机器人的神秘面纱
“足球健将”:Booster T1
今年3月
在德国举行的RoboCup机器人世界杯
公开赛成人组决赛中
清华火神队以9:0的压倒性比分击败
东道主德国Sweaty队
赢得冠军奖杯

清华火神队对决德国Sweaty队
火神队由清华大学
自动化系研究员赵明国创立
成员来自他的机器人实验室
本次参赛的Booster T1机器人
具备23个自由度
能够实现全向行走
并拥有感知和定位功能
不仅能理解并执行人类的语音指令
还能精准选择和操控不同颜色的小球
成功完成开球、控球和射门等任务
人形机器人的自由度最多也最复杂
“踢足球”可谓是检验具身智能的试金石
RoboCup是全球影响力最大的
机器人竞技赛事之一
成立于2004年的清华大学人形机器人足球队
长期参与RoboCup赛事并多次获奖
除了清华火神队
由清华大学机械系创办的TH-MOS机器人足球队
在2024年RoboCup机器人世界杯中国赛中
获得类人组冠军
“变形金刚”:微型无线陆空两栖机器人
它体长9厘米、重25克
是目前已知世界最小、最轻的
微型无线陆空两栖机器人
这是清华大学航天航空学院
张一慧教授课题组
自主研制的最小至几毫米的微型驱动器
该成果在4月18日晚
在线发表于国际权威期刊
《自然·机器智能》
(Nature Machine Intelligence)

处于地面运动模式下的微型无线陆空两栖机器人
该驱动器具备优异的变形和锁定能力
以及较强承载特性
作为“可变形外骨骼”
可用于集成传感器、电机等功能元器件
进而构建复杂的机器人系统
利用此驱动器组装成的微型陆空两栖机器人
通过变形
可跑、可飞、动作灵活
地面运动速度最高可达每秒1.6米
还能将任意变形形态随时固定
像“变形金刚”般
提升其环境适应能力
此团队还用10多个驱动器
研制出一款高4.5厘米、重仅0.8克的
迷你版“变形金刚”

由多个驱动器单元构成的迷你版“变形金刚”
未来这种微型陆空两栖机器人可应用于
设备故障诊断及检修、地质及文物勘探等场景
替代人类执行复杂危险环境下的多种任务
“大国工匠”:移动式混联加工机器人
2025年3月
中关村论坛上
清华大学机械系刘辛军教授团队研发的
“移动式混联加工机器人”
入选论坛发布的19项重大科技创新成果

移动式混联加工机器人
针对航天器大型构件制造难题
刘辛军团队首创“手眼脑”协同原位加工模式
攻克了跨尺度测量
静动态精度协同调控
高效柔性加工工艺等技术难题
该机器人具备
大范围定位和局部精细加工能力
能应用于北斗导航、载人航天、探月等
国家重大工程的大型构件制造
已在航天制造企业应用于多种型号产品生产
解决了航天器舱体、卫星结构等
大型构件的高效高精加工难题
“数字医师”:骨科手术机器人
在医疗领域
清华大学航天航空学院郑钢铁教授团队
与北京清华长庚医院骨科与运动医学中心
潘勇卫教授团队
共同研发了通用骨科手术机器人
该机器人主要用于骨科创伤
脊柱的置钉与固定手术
能够实现创伤、脊柱置钉导航
长骨骨折远端锁定等
覆盖创伤与脊柱95%以上的术式

骨科手术机器人
团队通过近十年的研发工作
将骨科手术机器人中的核心零部件
导航传感器国产化
将产品成本减少到同类产品的50%
精度提高70%
配合团队自主研发的骨科机器人置钉专利
在手术过程中不会对患者造成二次伤害
该产品的诞生标志着
国内手术机器人
国产化率和自主程度更进一步的提高
将有效地推动
国产骨科手术机器人的普及
促进优质医疗资源下沉及手术标准化
“仿生艺术家”:五指触感灵巧手
端水杯、抓鸡蛋
弹钢琴、穿针引线……
做这些动作的不是人的手
而是一只“灵巧手”
2024年9月9日
在珠海“模数空间”启用仪式上
清华大学计算机系孙富春教授团队展示的
“五指触感灵巧手”吸引了大家的目光
这是人形机器人的关键部件
已在多个领域应用

孙富春团队在2024年“深圳智能机器人灵巧手大赛”中展示灵巧手工具使用能力
“机器人是自动化的‘最后1公里’
灵巧手是机器人‘最后的1厘米’”
基于这样的判断
孙富春带领团队开发灵巧手
至今已历经多次迭代
形成了多种灵巧手
如12自由度柔性手、刚性的二指手
触觉感知五指手、假肢手等
灵巧手的应用非常广泛
可用于机器人、自动化行业及航天领域等
还可用于残疾人的假肢设备
增强他们的生活自理能力
团队研发的触觉五指灵巧手
具备多任务灵巧操作能力
获得2024年首届深圳灵巧手大赛冠军
清华大学人工智能研究院
智能机器人中心研发的
新一代灵巧手可感知4个模态
包括视觉、压触觉、视触觉、声音和位置
在国际上处于领先水平
目前已在国内30多家单位应用
“越野达人”:跑酷机器人
跑酷作为一种极限运动
对参与者的身体感知
手脚协同控制能力和敏捷性
提出了很高的要求
对于机器人来说
跑酷则更是一个巨大的挑战
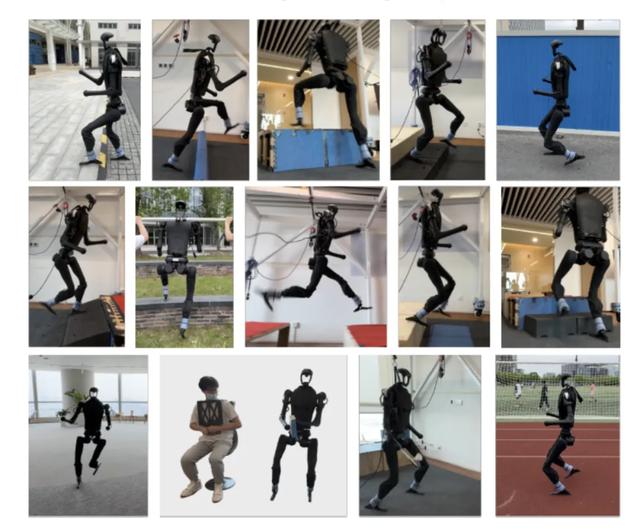
人形机器人跑酷学习
清华大学交叉信息研究院
助理教授赵行团队
致力于研发一种新颖的系统
旨在训练机器人
掌握一个通用的视觉跑酷策略
该策略不借助任何参考动作
即可自主实现复杂环境下的灵活跨越
通过这一策略
人形机器人能够轻松应对各种跑酷挑战
如从0.42米高的平台上起跳
越过障碍
以及跨越0.8米高的间隙等
该机器人还能在野外
以1.8米/秒的速度奔跑
并在不同的复杂地形上
保持稳健的行走能力
以穿越具有挑战性的现实世界环境
跑酷训练推动了人形机器人
在敏捷性、自主性
以及多任务能力方面的发展
为未来人形机器人在搜索救援、娱乐表演
以及日常生活中的应用奠定了基础
“古风乐队”:墨甲机器人
全球首支具有中国文化特色的
机器人表演团体
“墨甲”机器人乐队
由清华大学美术学院与未来实验室
联合发起
在这支机器人乐队中
三位乐师分别演奏竹笛、箜篌、排鼓
三种中国传统乐器

墨甲乐队演出现场
这支乐队不仅在价值层面
实现了中国风格原创
还在技术层面取得了
人工智能、机器人、音乐科技、造型艺术的
突破性进展
团队完成了多项机器人舞台表演展项设计
相关设计方法在山东曲阜孔子博物馆
洛阳应天门遗址博物馆
沧州中国大运河非物质文化展示馆等
文博展馆中得到了示范应用
从竞技体育到生命科学
从工业制造到文化艺术
这些看似冰冷的金属肌理
正在清华园里生长出温暖的科技内核
越来越多机器人领域的创新成果
在清华园中不断涌现
清华师生将不懈探索
拓展技术边界
加速在机器人领域的创新研究
将前沿科技
转化为推动社会进步的力量
为中国机器人领域的发展
注入新的动力
统筹 | 吕婷
文 | 郑青春
资料来源 | 各院系
排版 | 杨天舒
编辑 | 王志雄
责编 | 苑洁
审核 | 刘蔚如
清华大学版权所有