在开发新技术时,计算机科学家和机器人专家经常从动物和其他生物体中汲取灵感。这使他们能够人为地复制复杂的行为和运动模式,以提高其系统的性能、效率和能力。
近日,由浙江理工大学和埃塞克斯大学的研究人员合作开发了一种技术,可用于控制受海狸启发来引导的单腿的运动模式。他们的研究成果在《机器人与自主系统》上发表介绍,该方法使机器人能够自主学习如何进行类似于观察到海狸的游泳动作。
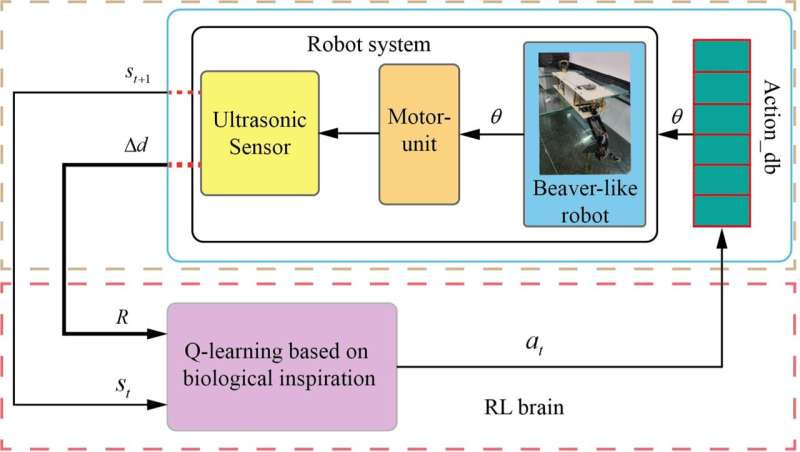
机器人的训练控制器结构
在这项研究中,研究人员引入了一种受生物启发的学习控制方法来模拟水下机器人的,这种方法主要基于他们之前研究海狸运动的一项工作,该工作。”研究人员创造的水下机器人是非线性系统,它们的运动涉及复杂的流体动力学。因此,对它们的运动进行准确建模可能是一项非常复杂且具有挑战性的任务,涉及大量的计算工作。
与过去引入的其他指导水下机器人运动的模型相比,研究人员设计的方法不需要集成基于流体动力学的复杂运动模型。这主要是因为它依赖于动态复制海狸游泳运动的简化关节角度。这些联合使模型更容易训练,同时也减少了机器人在训练期间的无效运动。
“通过将强化学习与支持海狸游泳行为的机制相结合,他们的方法可以尽可能快速且可操作地实现机器人的游泳控制,它最显着和独特的优势在于它可以避免构建复杂的运动控制模型,并快速实现对海狸状单腿机器人的游泳控制。”

研究人员使用单腿机器人平台在一系列实验中评估了他们受海狸启发的基于强化学习的方法。他们的结果非常有希望,他们的方法产生了有效的类似海狸的游泳动作,从而改善了机器人的运动。
将来,这组研究人员介绍的方法可用于改善其他设计用于在水中操作的单腿机器人的性能和运动。此外,他们的工作可能会激发开发类似方法来控制其他水下机器人的运动。
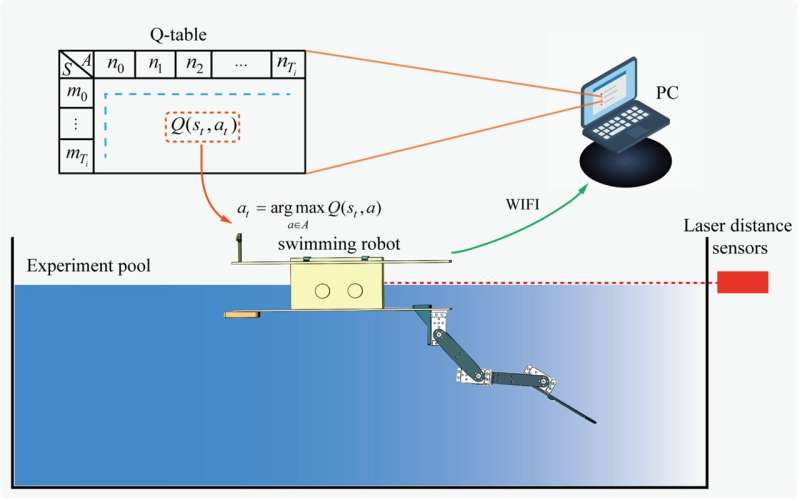
训练后的机器人实际控制器
研究人员表示“在未来的工作中,他们计划改进海狸式游泳机器人的结构和性能,他们还想研究如何使用强化学习来提高机器人游泳背后的智能,不仅关注机器人的游泳速度,还关注游泳稳定性、轨迹规划和避障,所有这些都在真实的水下环境中进行。”
